hace 5 años
La morfología de un robot, dejando de lado su apariencia externa, se refiere a la estructura interna y la disposición de sus componentes. Esta estructura interna, o anatomía robótica, determina en gran medida las capacidades y limitaciones del robot. No se trata solo de la suma de sus partes, sino de la interacción y coordinación entre ellas para lograr un funcionamiento eficiente y eficaz.

Componentes Fundamentales de la Morfología Interna de un Robot
La anatomía interna de un robot puede variar ampliamente según su diseño y propósito. Sin embargo, algunos componentes son comunes a la mayoría de los robots:
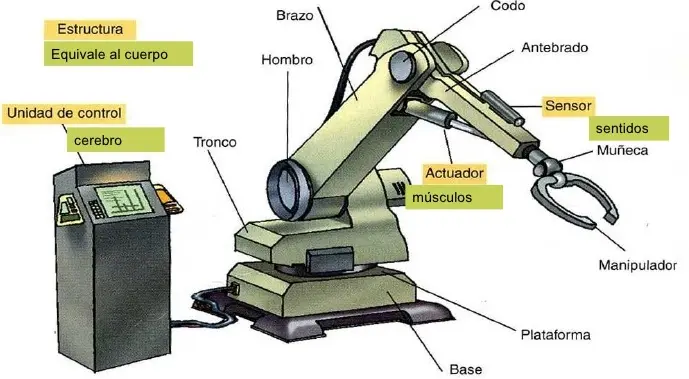
- Sistema de Actuación: Este es el sistema motor del robot. Incluye los actuadores, que son los dispositivos que convierten la energía (eléctrica, hidráulica, neumática) en movimiento. Los tipos de actuadores más comunes son los motores eléctricos (DC, AC, paso a paso, servomotores), los cilindros neumáticos e hidráulicos. La selección del actuador depende de factores como la precisión, la fuerza, la velocidad y el costo.
- Sistema de Transmisión: Este sistema se encarga de transmitir el movimiento generado por los actuadores a los diferentes elementos del robot. Incluye engranajes, correas, cadenas, cables y otros mecanismos que modifican la velocidad, la fuerza y la dirección del movimiento. La eficiencia de la transmisión es crucial para el rendimiento global del robot.
- Sistema de Sensores: Los sensores proporcionan información sobre el entorno y el estado del robot. Esta información es esencial para el control y la toma de decisiones. Los tipos de sensores más utilizados incluyen sensores de posición (encoders, potenciómetros), sensores de fuerza (celdas de carga), sensores de proximidad (ultrasonido, infrarrojo), sensores de visión (cámaras), sensores táctiles y sensores de temperatura.
- Sistema de Control: El cerebro del robot. Este sistema recibe información de los sensores, procesa esa información y genera las señales de control para los actuadores. Puede ser un sistema de control simple, basado en lógica cableada o un sistema complejo basado en microprocesadores o microcontroladores. La programación del sistema de control define el comportamiento del robot.
- Estructura Mecánica: Esta es la estructura física que soporta los demás componentes del robot. Puede estar compuesta de diferentes materiales, como metales (acero, aluminio) o polímeros, dependiendo de las necesidades de resistencia, peso y costo. El diseño de la estructura mecánica es crucial para la rigidez, la estabilidad y la precisión del robot.
- Sistema de Energía: Proporciona la energía necesaria para el funcionamiento de todos los componentes. Puede ser una batería, una fuente de alimentación externa o un sistema de generación de energía integrado. La autonomía y la eficiencia energética son factores importantes a considerar.
- Sistema de Comunicación: Permite la comunicación entre los diferentes componentes del robot y con el entorno externo. Puede incluir interfaces de comunicación como Ethernet, CAN bus, RS-232, entre otras. La capacidad de comunicación es esencial para la integración del robot en sistemas más complejos.
Tipos de Morfologías Internas
La morfología interna de un robot puede clasificarse en diferentes tipos según la arquitectura del sistema de actuación y la disposición de los componentes. Algunos ejemplos incluyen:
- Robots articulados: Utilizan una cadena cinemática de articulaciones rotatorias para lograr un amplio rango de movimiento.
- Robots cartesianos: Se mueven a lo largo de tres ejes ortogonales (X, Y, Z), lo que los hace ideales para tareas de precisión en un espacio de trabajo definido.
- Robots SCARA: Son robots con dos articulaciones rotatorias paralelas, ideales para tareas de ensamblaje.
- Robots paralelos: Utilizan una estructura paralela de actuadores para lograr una alta precisión y velocidad.
Tabla Comparativa de Sistemas de Actuación
| Sistema de Actuación | Ventajas | Desventajas |
|---|---|---|
| Motores Eléctricos | Alta precisión, control preciso, fácil mantenimiento | Menor fuerza en algunos casos, puede requerir reductores de velocidad |
| Cilindros Neumáticos | Alta fuerza, velocidad, bajo costo | Baja precisión, dificultad para el control preciso |
| Cilindros Hidráulicos | Alta fuerza, alta velocidad | Alto costo, mantenimiento complejo, riesgo de fugas |
Consultas Habituales sobre Morfología Interna de Robots
Algunas de las consultas más frecuentes sobre la morfología interna de un robot son:
- ¿Qué tipo de actuador es mejor para mi aplicación?
- ¿Cómo puedo mejorar la precisión del movimiento del robot?
- ¿Qué tipo de sensores necesito para mi aplicación?
- ¿Cómo puedo diseñar una estructura mecánica robusta y ligera?
- ¿Qué sistema de control es adecuado para mi robot?
Consideraciones en el Diseño de la Morfología Interna
El diseño de la morfología interna de un robot es un proceso complejo que requiere considerar varios factores. Algunos de los aspectos más importantes incluyen:

- Precisión: La capacidad del robot para realizar movimientos con alta exactitud.
- Velocidad: La rapidez con la que el robot puede realizar sus movimientos.
- Fuerza: La capacidad del robot para ejercer fuerza sobre su entorno.
- Rigidez: La resistencia del robot a la deformación.
- Peso: El peso del robot influye en su movilidad y consumo de energía.
- Costo: El costo de los componentes y el proceso de fabricación.
- Mantenimiento: La facilidad de mantenimiento y reparación del robot.
La optimización de la morfología interna es fundamental para el éxito del robot. Un diseño bien pensado maximiza el rendimiento, la eficiencia y la fiabilidad del sistema.
La morfología interna de un robot es un tema complejo que abarca una amplia gama de conocimientos de ingeniería mecánica, eléctrica y de control. La comprensión de los componentes, sus interacciones y las consideraciones de diseño es fundamental para el desarrollo de robots eficientes y eficaces.