hace 4 años
La robótica ha avanzado a pasos agigantados, dejando atrás la imagen de máquinas rígidas y predecibles. Hoy en día, la investigación se centra en desarrollar robots sensibles, capaces de interactuar con el entorno de una manera más natural e inteligente. Esto implica dotar a los robots de una amplia gama de capacidades sensoriales que les permitan percibir su entorno y responder de forma adaptativa.

Percepción Visual en Robots
La visión robótica es un área fundamental en el desarrollo de robots sensibles. Los sistemas de visión artificial se basan en diversas tecnologías, como cámaras, sonar, láser e identificación por radiofrecuencia (RFID). Estas tecnologías permiten a los robots “ver” su entorno, procesar imágenes y tomar decisiones basadas en la información visual recibida.
El procesamiento de imágenes es crucial para obtener información precisa. Algoritmos avanzados, como la transformada wavelet, se utilizan para mejorar la calidad de las imágenes y fusionar datos de diferentes espectros y focos, lo que permite a los robots obtener una comprensión más completa de su entorno. Los robots utilizan esta información visual para identificar objetos, navegar por espacios complejos y realizar tareas específicas.
El Sentido del Tacto en la Robótica
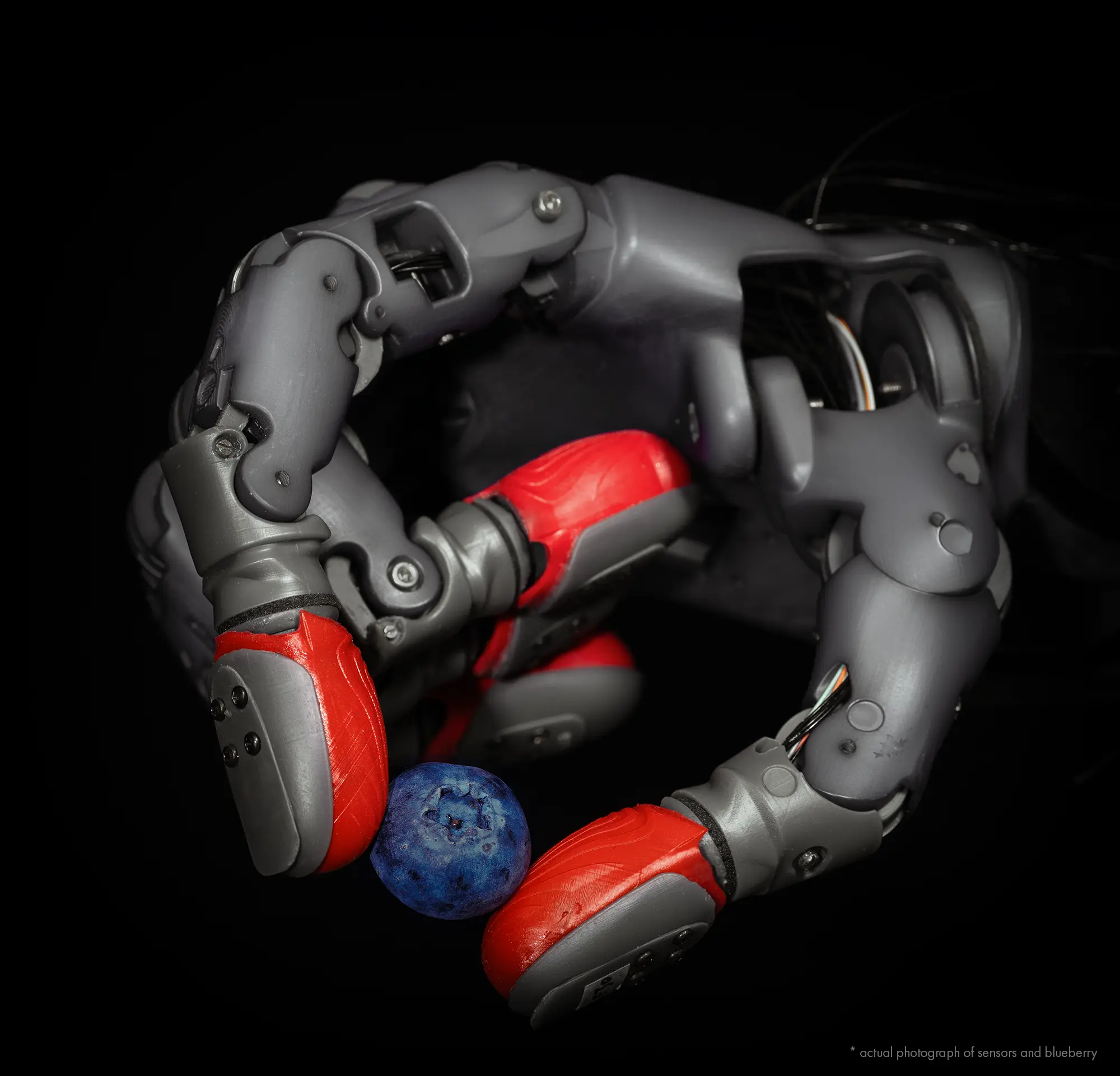
La creación de una piel artificial, o “ robot skin ”, es un desafío clave en la robótica sensible. Esta piel artificial debe ser flexible, estirable y capaz de autorepararse, imitando las funcionalidades de la piel humana. La investigación en este campo se centra en el desarrollo de materiales que combinen estas propiedades mecánicas con sensores capaces de detectar cambios de temperatura, presión y otras variables físicas.
Existen diferentes tipos de sensores táctiles, desde sensores de un solo punto hasta sensores de alta resolución espacial, similares a las yemas de los dedos humanos. Estos sensores permiten a los robots percibir la textura, la forma y la presión de los objetos con los que interactúan. El procesamiento de señales táctiles es complejo, ya que es necesario distinguir entre señales generadas por los movimientos del propio robot y las señales externas. Algoritmos adaptativos ayudan a filtrar las señales internas, mejorando la precisión de la detección del contacto.
Las aplicaciones de la sensibilidad táctil son diversas. Los robots pueden interpretar emociones humanas a través de patrones de contacto, mapear superficies en entornos hostiles y realizar tareas delicadas que requieren precisión y control de la fuerza, como cirugías asistidas por robots.
La Audición Robótica
La capacidad de escuchar es otra dimensión importante de la sensibilidad robótica. Los sensores de audio, combinados con algoritmos de procesamiento de señales, permiten a los robots percibir sonidos, identificar voces e incluso interpretar emociones a través del tono y la entonación de la voz.
Para lograr una audición precisa, es necesario minimizar el ruido interno de los sensores. Las soluciones actuales combinan matrices acústicas con micrófonos y dispositivos piezoeléctricos para reducir el ruido de fondo y mejorar la calidad de la señal. Los robots también pueden utilizar sistemas de detección de actividad vocal (VAD) para identificar y localizar fuentes de sonido, como instrucciones de voz en entornos ruidosos.
La interpretación del lenguaje y las emociones a través del sonido es un área activa de investigación. Los robots pueden analizar características acústicas y lingüísticas del habla para identificar emociones como la alegría, la tristeza o la ira, lo que abre la puerta a interacciones humano-robot más naturales y empáticas.
Otros Sentidos y Percepciones
Más allá de la visión, el tacto y la audición, la investigación en robótica explora otras capacidades sensoriales. Se trabaja en el desarrollo de robots con sentidos del olfato y el gusto, utilizando sensores químicos capaces de detectar diferentes compuestos y sabores. Estos robots podrían utilizarse en diversas aplicaciones, como la detección de fugas de gas, la inspección de alimentos o la preparación de comida personalizada.
Además, la robótica está investigando sentidos que no existen en los humanos, como la detección de campos magnéticos o la percepción de componentes peligrosos en el aire. Estos nuevos sentidos podrían proporcionar a los robots capacidades únicas para operar en entornos extremos o realizar tareas complejas.

Sensibilidad Colectiva y Toma de Decisiones
Una tendencia emergente en la robótica es la sensibilidad colectiva. Los robots pueden compartir, almacenar y transmitir datos sensoriales, aprendiendo unos de otros y tomando decisiones colectivas basadas en la información combinada. Esta capacidad permite a los robots colaborar en tareas complejas, resolver problemas de forma más eficiente y adaptar su comportamiento a las circunstancias cambiantes.
El procesamiento de datos sensoriales puede incluir procesos avanzados, como el reconocimiento facial, el reconocimiento de expresiones faciales y la integración de conocimiento abstracto. Esto permite a los robots comprender mejor el contexto de sus acciones e interactuar con los humanos de forma más significativa.
Tabla Comparativa de Sensores Robóticos
| Sensor | Función | Aplicaciones |
|---|---|---|
| Visual | Percepción del entorno a través de imágenes | Navegación, reconocimiento de objetos, inspección |
| Táctil | Detección de presión, textura y forma | Manipulación de objetos, interacción humano-robot, prótesis |
| Auditivo | Percepción de sonidos y voz | Reconocimiento de voz, interpretación de emociones, detección de anomalías |
| Químico (Olfato/Gusto) | Detección de compuestos químicos | Detección de fugas, inspección de alimentos, preparación de comida |
| Magnético | Detección de campos magnéticos | Navegación en entornos específicos, inspección de materiales |
El Futuro de los Robots Sensibles
El desarrollo de robots sensibles es un campo en constante evolución. La investigación futura se centrará en mejorar la precisión, la fiabilidad y la eficiencia de los sensores, así como en el desarrollo de algoritmos de procesamiento de datos más sofisticados. El objetivo es crear robots capaces de interactuar con el entorno de forma natural, inteligente y segura, abriendo nuevas posibilidades en diversas áreas, desde la medicina y la industria hasta el cuidado de personas y el entretenimiento.
La integración de diferentes sentidos y la capacidad de aprendizaje automático permitirán a los robots adaptarse a entornos cambiantes y realizar tareas complejas que requieren una comprensión profunda del entorno que les rodea. El desarrollo de robots sensibles es un paso crucial hacia un futuro donde los robots desempeñan un papel cada vez más importante en nuestra vida diaria.