hace 6 meses
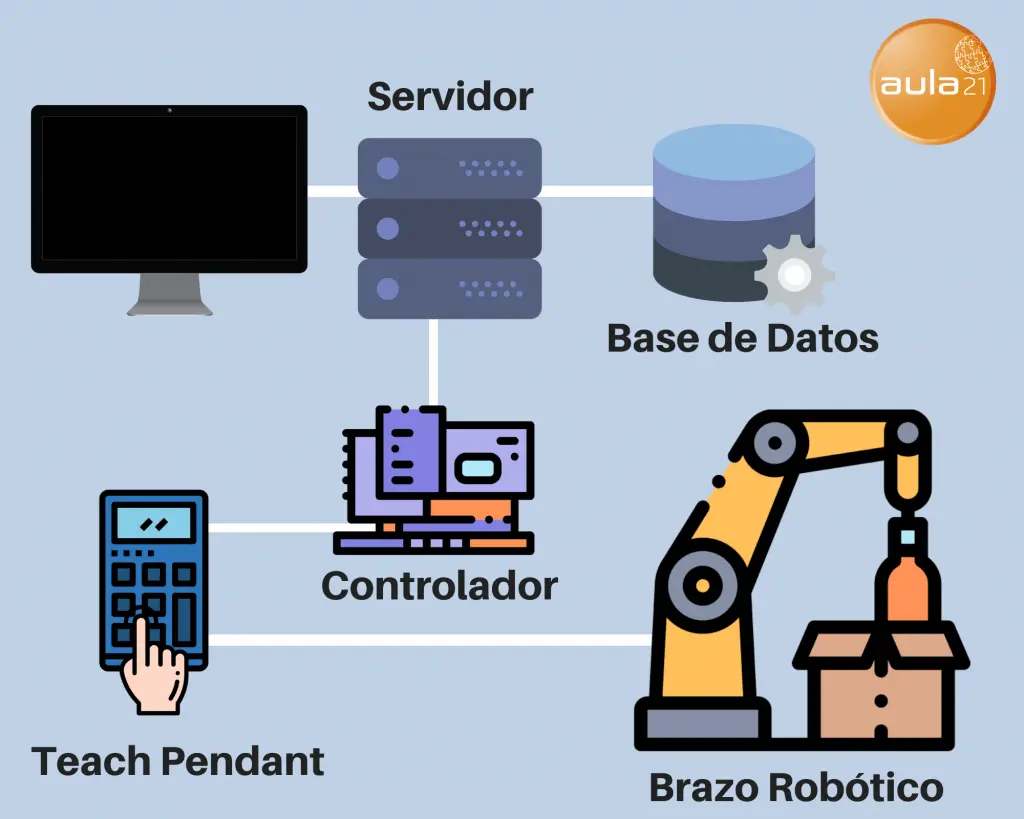
La interface de control de un robot, dejando de lado su estructura física externa, es un complejo sistema que integra hardware y software para gestionar y coordinar sus movimientos y acciones. Su diseño depende en gran medida de la complejidad y la aplicación específica del robot, pero se pueden identificar componentes y principios comunes.
Componentes principales de la interface de control
La interface de control de un robot puede dividirse en varios componentes interconectados que trabajan en conjunto:
- Unidad central de procesamiento (CPU): El cerebro del sistema. Se encarga de ejecutar las instrucciones del programa, procesar datos de los sensores y enviar señales de control a los actuadores.
- Memoria: Almacena el programa del robot, los datos de los sensores y otras informaciones necesarias para su funcionamiento. Puede ser de tipo RAM (volátil) o ROM (no volátil).
- Interfaz de usuario (I/O): Permite la comunicación entre el operador humano y el robot. Puede incluir pantallas táctiles, teclados, mandos, o interfaces de software más sofisticadas.
- Buses de comunicación: Conjuntos de cables o canales de comunicación que transmiten datos entre los diferentes componentes de la interface de control. Ejemplos incluyen buses industriales como CAN, Ethernet o ProfiBus.
- Controladores de movimiento: Se encargan de generar las señales precisas para controlar la posición, velocidad y aceleración de los actuadores del robot. Suelen incluir algoritmos de control avanzados para asegurar la precisión y la estabilidad del movimiento.
- Convertidores analógico-digital (ADC) y digital-analógico (DAC): Los ADC convierten las señales analógicas de los sensores en señales digitales que la CPU puede procesar. Los DAC convierten las señales digitales de la CPU en señales analógicas para controlar los actuadores.
- Sensores: Proporcionan información sobre el entorno y el estado del robot. Pueden ser sensores de posición (encoders), de fuerza (celdas de carga), de proximidad (sensores ultrasónicos o láser), de visión (cámaras), entre otros. La calidad y cantidad de sensores influyen en la capacidad del robot de interactuar con su entorno de forma segura y eficiente.
- Actuadores: Son los músculos del robot. Ejecutan las órdenes de control recibidas desde la CPU. Pueden ser motores eléctricos, actuadores neumáticos o hidráulicos.
- Sistema de potencia: Proporciona la energía necesaria para alimentar los diferentes componentes del sistema, incluyendo la CPU, los controladores de movimiento, y los actuadores.
Arquitecturas de control
Existen diferentes arquitecturas para organizar la interface de control de un robot, cada una con sus ventajas e inconvenientes. Algunas de las más comunes son:
- Arquitectura centralizada: Todas las funciones de control se ejecutan en una única CPU. Es sencilla, pero puede ser limitada en términos de velocidad y capacidad de procesamiento para robots muy complejos.
- Arquitectura distribuida: Las funciones de control se distribuyen entre varias CPUs, cada una responsable de una parte específica del robot. Ofrece mayor capacidad de procesamiento, mayor fiabilidad (si una CPU falla, las demás pueden seguir funcionando) y escalabilidad.
- Arquitectura jerárquica: Se organizan diferentes niveles de control, desde un nivel superior que define las tareas generales, hasta niveles inferiores que se encargan del control de movimientos detallados. Este tipo de arquitectura es útil para robots complejos que deben realizar tareas complejas.
Software de control
El software de control es esencial para la operación del robot. Incluye:
- Sistema operativo en tiempo real (RTOS): Garantiza que las tareas de control se ejecuten en el tiempo adecuado, lo que es crucial para la precisión y la estabilidad del movimiento del robot. Ejemplos incluyen VxWorks, QNX, FreeRTOS.
- Lenguaje de programación: Se utiliza para programar el comportamiento del robot. Algunos lenguajes comunes incluyen C, C++, Python, o lenguajes de programación específicos para robots.
- Bibliotecas de funciones: Proporcionan funciones pre-programadas para tareas comunes, como el control de movimiento, la comunicación con sensores y actuadores, y la gestión de la interfaz de usuario.
- Entorno de desarrollo integrado (IDE): Facilita la escritura, depuración y ejecución del software de control.
Consideraciones de diseño
El diseño de la interface de control debe considerar varios factores:

- Precisión: La capacidad del robot para realizar movimientos con la precisión requerida.
- Velocidad: La rapidez con la que el robot puede ejecutar las tareas.
- Robustez: La capacidad del sistema para funcionar correctamente a pesar de las perturbaciones o errores.
- Fiabilidad: La probabilidad de que el sistema funcione correctamente durante un período determinado.
- Seguridad: Mecanismos para prevenir accidentes y proteger al personal y al equipo.
- Escalabilidad: La facilidad para adaptar el sistema a robots de diferentes tamaños y complejidad.
Consultas habituales sobre la interface de control robótica
| Pregunta | Respuesta |
|---|---|
| ¿Qué tipo de CPU se utiliza en la robótica? | Existen diferentes tipos, desde microcontroladores sencillos hasta CPUs más potentes, dependiendo de la aplicación. |
| ¿Cómo se programa un robot? | Mediante lenguajes de programación específicos o lenguajes de propósito general, utilizando un IDE y herramientas de depuración. |
| ¿Qué es un controlador de movimiento? | Un componente que genera las señales precisas para controlar la posición, velocidad y aceleración de los actuadores. |
| ¿Qué tipos de sensores se utilizan? | Una amplia variedad, incluyendo sensores de posición, fuerza, proximidad, visión, etc. |
| ¿Qué protocolos de comunicación se utilizan? | CAN, Ethernet/IP, Profinet, entre otros. |
Tabla comparativa de arquitecturas de control
| Arquitectura | Ventajas | Desventajas |
|---|---|---|
| Centralizada | Sencilla, de bajo coste | Limitada en procesamiento, menos robusta |
| Distribuida | Mayor capacidad de procesamiento, más robusta | Más compleja, de mayor coste |
| Jerárquica | Adecuada para tareas complejas, flexible | Compleja de diseñar e implementar |
La interface de control de un robot es un sistema complejo y sofisticado que integra hardware y software para gestionar sus movimientos y acciones. Su diseño debe considerar diversos factores para garantizar la precisión, la velocidad, la robustez, la fiabilidad y la seguridad del robot.