hace 5 años
En el maravilloso entorno de la robótica, la capacidad de interactuar con el entorno de manera eficiente y segura depende en gran medida de la integración de sistemas de sensores. Estos dispositivos actúan como los órganos sensoriales de los robots, proporcionándoles información crucial sobre su entorno y su propio estado. Sin ellos, los robots serían sistemas ciegos e incapaces de realizar tareas complejas o de operar en entornos dinámicos.
Tipos de Sensores en Robótica y Control
La variedad de sensores disponibles para aplicaciones robóticas es extensa, cada uno especializado en la detección de un tipo particular de información. La selección del sensor adecuado depende en gran medida de la tarea específica que el robot debe realizar. Algunos de los tipos de sensores más comunes incluyen:
- Sensores de distancia: Utilizados para medir la distancia a objetos cercanos. Ejemplos incluyen sensores ultrasónicos, sensores láser (LiDAR), sensores de tiempo de vuelo (ToF) y sensores infrarrojos. Estos son esenciales para la navegación, la prevención de colisiones y la manipulación de objetos.
- Sensores de proximidad: Detectan la presencia de objetos sin necesidad de medir la distancia exacta. Son útiles para la detección de obstáculos y el control de posición.
- Sensores de contacto: Detectan el contacto físico con un objeto. Se utilizan en aplicaciones de agarre, manipulación y detección de impactos.
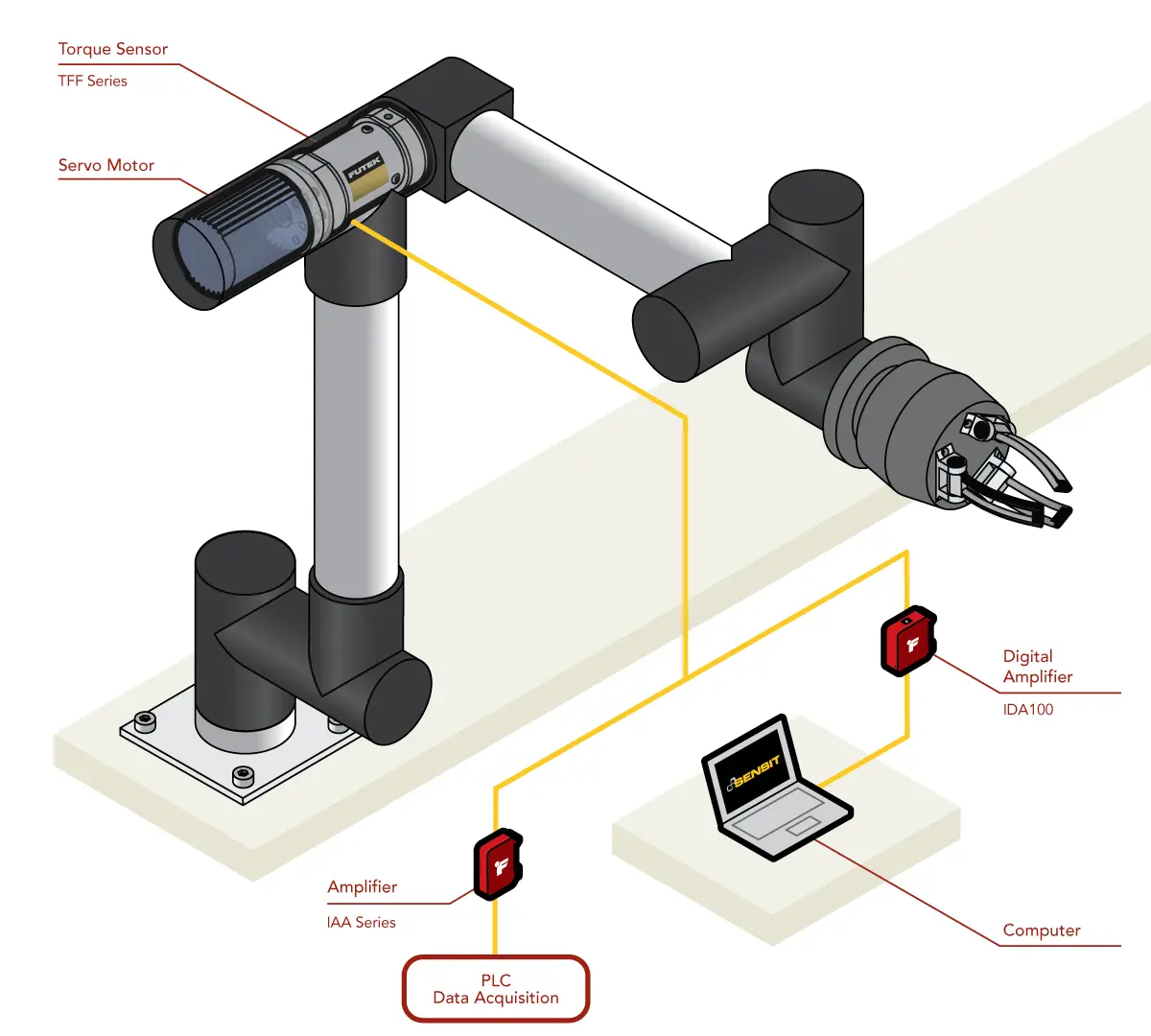
- Sensores de fuerza y torque: Miden la fuerza y el torque aplicados a un objeto. Son críticos en aplicaciones de manipulación precisa y agarre delicado.
- Sensores de visión: Cámaras que capturan imágenes del entorno. Estas imágenes se procesan para extraer información sobre objetos, posiciones y características del entorno. Permiten tareas de reconocimiento de objetos, navegación visual y control de movimientos complejos.
- Sensores inerciales (IMU): Miden la aceleración y la velocidad angular. Son importantes para la navegación, la estabilización de plataformas y el control de movimientos precisos.
- Sensores de posición y ángulo: Como los codificadores, potenciómetros y resolvers, proporcionan información sobre la posición y el ángulo de las articulaciones del robot. Son fundamentales para el control preciso del movimiento.
- Sensores de temperatura: Miden la temperatura del entorno o de componentes internos del robot. Se utilizan en aplicaciones de seguridad y control térmico.
- Sensores de presión: Miden la presión en un punto específico. Se emplean en aplicaciones de agarre y manipulación de objetos.
- Sensores químicos: Detectan la presencia de diferentes gases o sustancias químicas. Se utilizan en aplicaciones de monitoreo ambiental y control de procesos industriales.
Integración de Sensores en Sistemas de Control Robótico
Los datos proporcionados por los sensores son esenciales para el funcionamiento de los sistemas de control robótico. Estos sistemas utilizan algoritmos de control para procesar la información sensorial y generar las señales de control necesarias para que el robot realice las tareas deseadas. Algunos de los métodos de control más comunes incluyen:
- Control PID: Un método ampliamente utilizado para el control de posición, velocidad y fuerza. Se basa en el error entre la señal deseada y la señal medida por los sensores.
- Control por modelo: Utiliza un modelo matemático del sistema robótico para predecir su comportamiento y generar señales de control que corrijan las desviaciones.
- Control adaptativo: Ajusta los parámetros del controlador en tiempo real en función de las variaciones en el entorno o en el propio robot.
- Control predictivo: Predice el comportamiento futuro del robot y genera señales de control para optimizar su trayectoria y evitar posibles colisiones.
- Control basado en aprendizaje por refuerzo: Utiliza algoritmos de aprendizaje automático para aprender las mejores estrategias de control a partir de la interacción con el entorno.
Tabla Comparativa de Sensores
| Sensor | Principio de funcionamiento | Aplicaciones | Ventajas | Desventajas |
|---|---|---|---|---|
| Sensores ultrasónicos | Emisión y recepción de ondas sonoras | Detección de obstáculos, medición de distancia | Bajo costo, fácil de implementar | Precisión limitada, afectado por la temperatura y el ruido |
| Sensores láser (LiDAR) | Emisión y recepción de luz láser | Cartografía, navegación autónoma, detección de objetos | Alta precisión, amplio rango de detección | Alto costo, sensible a las condiciones ambientales |
| Sensores de visión | Procesamiento de imágenes | Reconocimiento de objetos, navegación visual, inspección | Información rica, versatilidad | Alto costo computacional, sensible a la iluminación |
| Sensores de fuerza y torque | Medición de la fuerza y el torque aplicados | Manipulación precisa de objetos, agarre seguro | Alta precisión, información detallada | Alto costo, requiere calibración |
| Sensores inerciales (IMU) | Medición de la aceleración y la velocidad angular | Navegación, estabilización de plataformas | Compacto, alta frecuencia de muestreo | Drift, susceptible a las vibraciones |
Consultas Habituales sobre Sensores y Robótica
Aquí abordamos algunas de las preguntas más comunes relacionadas con el uso de sensores en robótica y control:

- ¿Qué sensor es el mejor para mi aplicación? La elección del sensor depende de la aplicación específica. Se deben considerar factores como la precisión, el rango de detección, el costo, el tamaño y el consumo de energía.
- ¿Cómo se integran los sensores en un sistema robótico? La integración implica la conexión física del sensor al sistema de control, la calibración del sensor y la programación del software para procesar los datos.
- ¿Cómo se procesan los datos de los sensores? Los datos de los sensores se procesan utilizando algoritmos específicos que dependen de la aplicación. A menudo, se utilizan técnicas de filtrado, fusión de datos y aprendizaje automático.
- ¿Qué es la fusión de datos de sensores? La fusión de datos de sensores combina información de múltiples sensores para obtener una representación más completa y precisa del entorno.
- ¿Cómo se calibran los sensores? La calibración es un proceso crucial para garantizar la precisión de los datos del sensor. Se realiza mediante la comparación de las lecturas del sensor con valores de referencia conocidos.
El Futuro de los Sensores en Robótica
El campo de la robótica está en constante evolución, y el desarrollo de nuevos sensores juega un papel crucial en este progreso. El futuro de los sensores en robótica se caracteriza por:
- Miniaturización: El desarrollo de sensores más pequeños y eficientes energéticamente permitirá la creación de robots más compactos y versátiles.
- Mayor precisión y sensibilidad: Los avances en la tecnología de sensores mejorarán su precisión y capacidad para detectar señales débiles.
- Inteligencia integrada: Se espera que los sensores incorporen capacidades de procesamiento de datos y aprendizaje automático, lo que permitirá una mayor autonomía y capacidad de toma de decisiones en los robots.
- Sensores multifuncionales: El desarrollo de sensores que pueden medir múltiples parámetros simultáneamente reducirá el costo y la complejidad de los sistemas robóticos.
- Mayor integración con sistemas de IA: La sinergia entre sensores y la inteligencia artificial permitirá la creación de robots más inteligentes y adaptables.
Los sensores son componentes esenciales en el diseño y la operación de sistemas robóticos. Su capacidad para proporcionar información crucial sobre el entorno y el estado del robot permite el desarrollo de robots capaces de realizar tareas complejas y operar en entornos desafiantes. El avance continuo en la tecnología de sensores impulsa la innovación en robótica y abre nuevas posibilidades para el desarrollo de robots cada vez más autónomos e inteligentes.