hace 3 años
La robótica moderna se basa en la capacidad de representar y manipular la orientación y posición de los objetos en el espacio tridimensional. Si bien existen diversas maneras de lograr esto, los cuaterniones se han consolidado como una herramienta fundamental, especialmente en aplicaciones que exigen precisión, eficiencia y manejo de rotaciones complejas.

¿Qué son los Cuaterniones?
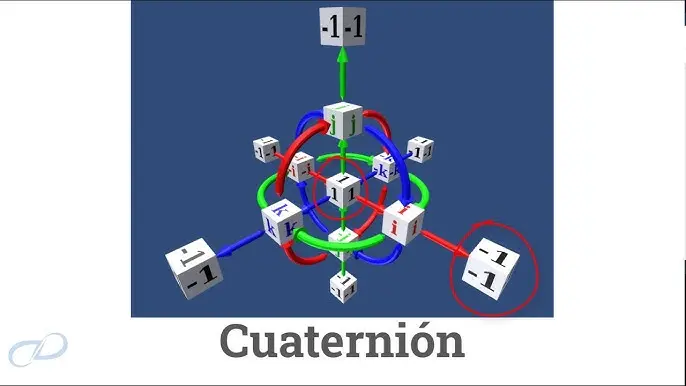
Los cuaterniones, una extensión de los números complejos, son entidades matemáticas de cuatro componentes que se representan de la siguiente manera: q = a + bi + cj + dk, donde a, b, c, y dson números reales, e i, j, kson unidades imaginarias que cumplen las siguientes relaciones:
- i² = j² = k² = -1
- ij = k, jk = i, ki = j
- ji = -k, kj = -i, ik = -j
Esta estructura algebraica, aunque pueda parecer compleja a primera vista, proporciona una representación elegante y eficiente de las rotaciones en el espacio 3D. A diferencia de otros métodos como los ángulos de Euler (que sufren del problema de gimbal lock), los cuaterniones evitan singularidades, ofreciendo una representación suave y continua de las rotaciones, incluso en giros de gran magnitud.
Representaciones de los Cuaterniones
Los cuaterniones pueden representarse de diferentes maneras:
- Forma vectorial: q = (a, v ), donde a es la parte escalar (real) y v = (b, c, d) es la parte vectorial (imaginaria).
- Forma matricial: Los cuaterniones pueden representarse mediante matrices complejas de 2x2 o matrices reales de 4xEstas representaciones son útiles para realizar operaciones algebraicas como la multiplicación y la inversión.
Aritmética Básica de Cuaterniones
Las operaciones aritméticas básicas con cuaterniones son:
Suma:
La suma de dos cuaterniones se realiza sumando componente a componente:

q1 + q2 = (a1 + a2) + (b1 + b2)i + (c1 + c2)j + (d1 + d2)k
Producto:
El producto de dos cuaterniones es algo más complejo y no es conmutativo (q1q2 ≠ q2q1):

q1q2 = (a1a2 - b1b2 - c1c2 - d1d2) + (a1b2 + b1a2 + c1d2 - d1c2)i + (a1c2 - b1d2 + c1a2 + d1b2)j + (a1d2 + b1c2 - c1b2 + d1a2)k
Conjugado:
El conjugado de un cuaternión qse denota como qy se obtiene cambiando el signo de la parte vectorial:

q = a - bi - cj - dk
Norma:
La norma de un cuaternión (su magnitud) se calcula como:
||q|| = √(a² + b² + c² + d²)
Inverso:
El inverso de un cuaternión qse calcula como:
q⁻¹ = q / ||q||²
Exponenciación y Logaritmo:
Las funciones exponencial y logarítmica también están definidas para cuaterniones, aunque sus propiedades son diferentes a las de los números complejos. Estas funciones son cruciales en la interpolación de rotaciones.
Cuaterniones y Rotaciones en Robótica
La principal aplicación de los cuaterniones en robótica es la representación de rotaciones. Un cuaternión unitario (con norma igual a 1) representa una rotación en el espacio 3D. La rotación se especifica mediante un ángulo y un eje de rotación. La relación entre un cuaternión unitario y la rotación correspondiente se puede expresar como:
q = cos(θ/2) + sin(θ/2)(xi + yj + zk)
donde θ es el ángulo de rotación y (x, y, z) es el vector unitario que define el eje de rotación.
Las ventajas del uso de cuaterniones para representar rotaciones en robótica son:
- Eficiencia computacional: Las operaciones con cuaterniones son generalmente más rápidas que las operaciones con matrices de rotación.
- Compacidad: Un cuaternión unitario se representa con solo cuatro números, mientras que una matriz de rotación requiere nueve.
- Ausencia de singularidades: Los cuaterniones evitan el problema del gimbal lock, asegurando una representación continua y suave de las rotaciones.
- Interpolación de rotaciones: La interpolación entre dos orientaciones representadas mediante cuaterniones es sencilla y eficiente, permitiendo animaciones suaves y realistas.
Aplicaciones en Robótica
Los cuaterniones encuentran aplicación en diversas áreas de la robótica, incluyendo:
- Control de robots manipuladores: Para planificar y controlar las trayectorias de los robots, especificando la orientación deseada de los efectores finales.
- Navegación de robots móviles: Para representar la orientación del robot en el espacio y para realizar la fusión de datos de sensores.
- Simulación robótica: Para simular el movimiento de los robots y visualizar su comportamiento.
- Visión por computador robótica: Para representar la orientación de los objetos en las escenas 3D captadas por las cámaras.
- Calibración de sensores: Para determinar la orientación relativa entre diferentes sensores en un sistema robótico.
Ventajas y Desventajas de usar Cuaterniones
Ventajas:
- Sin singularidades: A diferencia de los ángulos de Euler, los cuaterniones no sufren el problema del bloqueo de cardán (gimbal lock).
- Eficiencia computacional: Las operaciones de multiplicación y rotación son más eficientes que con matrices de rotación.
- Compacidad: Representan la orientación con cuatro números, menos que una matriz de rotación (nueve números).
- Interpolación suave: Facilitan la interpolación entre diferentes orientaciones.
Desventajas:
- Mayor complejidad conceptual: Su comprensión requiere un conocimiento más profundo de álgebra.
- Normalización: Los cuaterniones deben normalizarse para asegurar que representen rotaciones válidas.
- Interpretación menos intuitiva: No son tan intuitivos como los ángulos de Euler para la visualización directa de la orientación.
Comparación con otros Métodos de Representación de Orientación
A continuación se presenta una tabla comparativa entre los cuaterniones y otros métodos comunes para representar la orientación en robótica:
| Método | Ventajas | Desventajas |
|---|---|---|
| Cuaterniones | Sin singularidades, eficiente, compacto, interpolación suave | Complejidad conceptual, requiere normalización |
| Ángulos de Euler | Intuitivo, fácil de comprender | Sufre de gimbal lock, singularidades |
| Matrices de Rotación | Directo, bien entendido | Menos eficiente, requiere nueve números |
| Ángulos de Tait-Bryan | Relativamente simple | Sufre de gimbal lock |
Conclusión
Los cuaterniones son una herramienta poderosa y eficiente para representar y manipular rotaciones en robótica. Si bien su comprensión requiere un esfuerzo inicial, sus ventajas en términos de eficiencia, compacidad y ausencia de singularidades los convierten en una opción preferida en muchas aplicaciones robóticas modernas, especialmente en sistemas donde la precisión y el rendimiento son críticos. El dominio de los cuaterniones es fundamental para cualquier ingeniero o investigador que trabaja en el campo de la robótica.

Consultas Habituales sobre Cuaterniones en Robótica
Aquí se responden algunas de las preguntas más frecuentes sobre el uso de cuaterniones en robótica:
- ¿Cómo convierto ángulos de Euler a cuaterniones? Existen fórmulas directas para realizar esta conversión.
- ¿Cómo interpolo entre dos orientaciones representadas con cuaterniones? La interpolación esférica (slerp) es un método común y eficiente.
- ¿Qué son los cuaterniones duales? Son una extensión de los cuaterniones que permiten representar tanto rotaciones como traslaciones simultáneamente.
- ¿Cómo manejo la normalización de cuaterniones? Es importante normalizar los cuaterniones periódicamente para evitar la acumulación de errores numéricos.