hace 5 años
La robótica industrial ha experimentado un auge significativo, impulsada por la necesidad de automatizar procesos y optimizar la producción. En este contexto, la comprensión de los modelos cinemáticos y dinámicos de los robots resulta fundamental para su diseño, control y aplicación. Este artículo profundiza en el método cinemático directo, una herramienta esencial para la comprensión del movimiento robótico.
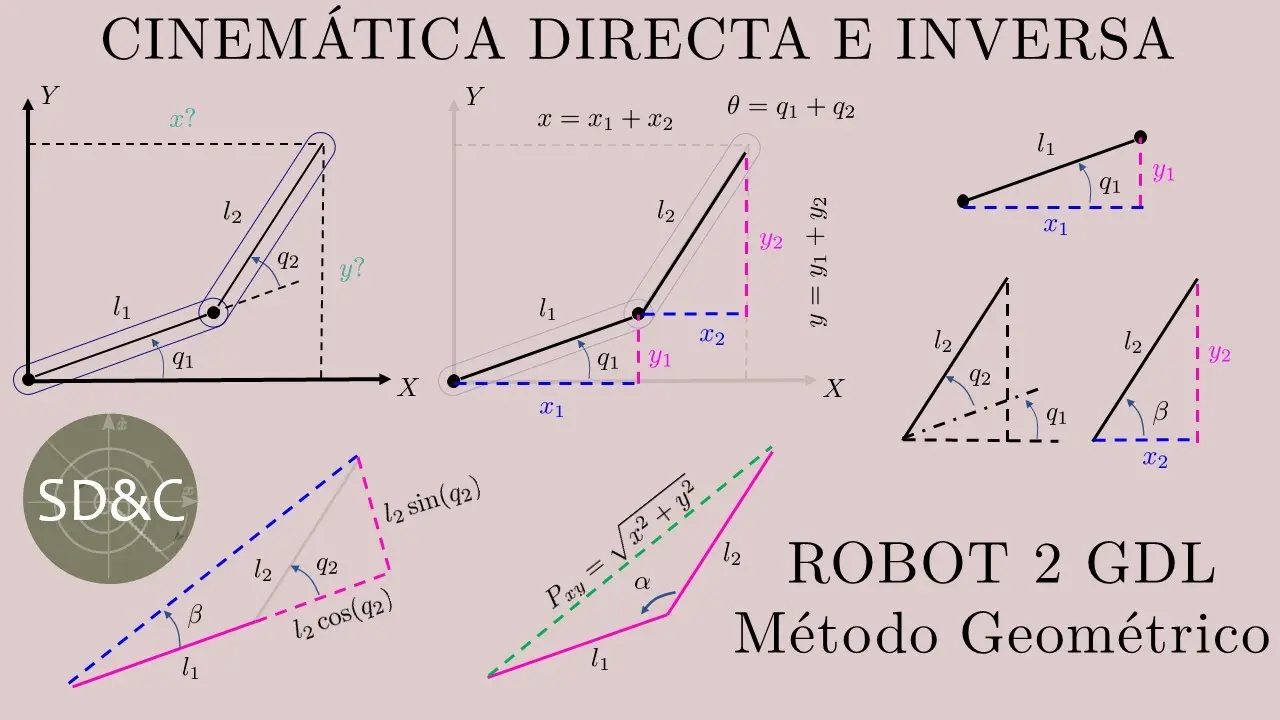
¿Qué es el Modelo Cinemático Directo?
El modelo cinemático directo (MCD) en robótica establece una relación matemática entre las coordenadas articulares de un robot (posiciones de sus juntas) y la posición y orientación de su extremo final (efector final). En esencia, el MCD responde a la pregunta: "Dadas las posiciones de las juntas, ¿dónde se encuentra el efector final?". Este modelo es fundamental para simular el movimiento del robot y para planificar trayectorias.
Componentes Clave del Modelo Cinemático Directo
El desarrollo del MCD implica varios pasos y componentes esenciales:
- Definición de la Estructura del Robot: Se describe la estructura mecánica del robot, incluyendo el número de grados de libertad (GDL), los tipos de articulaciones (rotacionales o prismáticas) y las longitudes de los eslabones.
- Convenciones de Denavit-Hartenberg (DH): Este sistema de coordenadas permite asignar marcos de referencia a cada eslabón del robot, simplificando la descripción de su geometría.
- Matrices de Transformación Homogénea: Estas matrices representan las transformaciones geométricas (rotaciones y traslaciones) entre los marcos de referencia consecutivos. La multiplicación de estas matrices permite obtener la posición y orientación del efector final.
- Cálculo de la Posición y Orientación del Efector Final: El producto de las matrices de transformación homogénea proporciona la posición y orientación del efector final respecto a un sistema de coordenadas de referencia.
Modelos Cinemáticos: Directo e Inverso
Además del modelo cinemático directo, existe el modelo cinemático inverso (MCI). Mientras el MCD calcula la posición del efector final a partir de las posiciones articulares, el MCI realiza la operación inversa: determina las posiciones articulares necesarias para alcanzar una posición y orientación deseadas del efector final. Ambas son cruciales para el control y la programación del robot.
Cinemática Directa e Inversa de Posición y Velocidad
Se puede diferenciar aún más los modelos cinemáticos en base a si se calcula la posición o la velocidad del efector final:
- Cinemática Directa de Posición: Calcula la posición del efector final dadas las posiciones articulares.
- Cinemática Inversa de Posición: Calcula las posiciones articulares necesarias para alcanzar una posición específica del efector final.
- Cinemática Directa de Velocidad: Calcula la velocidad del efector final dadas las velocidades articulares. Emplea la matriz Jacobiana, que relaciona las velocidades articulares con la velocidad del efector final.
- Cinemática Inversa de Velocidad: Calcula las velocidades articulares necesarias para alcanzar una velocidad específica del efector final. Utiliza la pseudoinversa de la matriz Jacobiana.
Modelo Dinámico en Robótica
El modelo cinemático directo proporciona información sobre la posición y orientación, pero no considera las fuerzas y momentos que actúan sobre el robot. Para esto se necesita el modelo dinámico, que describe el comportamiento del robot bajo la influencia de fuerzas externas y las fuerzas de inercia internas. Este modelo es crucial para el diseño de controladores de alta precisión y para la simulación de movimientos complejos.
Formulación de Euler-Lagrange
Un método común para obtener el modelo dinámico es la formulación de Euler-Lagrange. Esta formulación utiliza la energía cinética y potencial del robot para determinar las ecuaciones de movimiento. El resultado es un sistema de ecuaciones diferenciales que relacionan las fuerzas aplicadas con las aceleraciones articulares.

Validación del Modelo Cinemático
La validación de los modelos cinemáticos es esencial para asegurar su precisión y confiabilidad. Esto se puede lograr mediante:
- Simulaciones: Se utiliza software de simulación para verificar el comportamiento del modelo bajo diferentes condiciones.
- Pruebas Experimentales: Se realizan experimentos con un robot real para comparar los resultados del modelo con las mediciones obtenidas.
Análisis de Errores
Durante la validación, es crucial analizar los errores entre los resultados del modelo y las mediciones reales. Se deben identificar las fuentes de error y evaluar su impacto en la precisión del modelo. Esto puede incluir errores de medición, errores de modelado, y errores en la calibración del robot.
Ejemplos Prácticos
El método cinemático directo se aplica en diversas tareas de robótica, incluyendo:
- Planificación de Trayectorias: Se utiliza para generar trayectorias óptimas para el robot que eviten obstáculos y minimicen el tiempo de ejecución.
- Simulación de Robots: Permite simular el movimiento del robot en un entorno virtual antes de implementarlo en el entorno real.
- Control de Movimiento: Es fundamental para el diseño de controladores de movimiento precisos y robustos.
Tabla Comparativa: MCD vs. MCI
| Característica | Modelo Cinemático Directo (MCD) | Modelo Cinemático Inverso (MCI) |
|---|---|---|
| Entrada | Posiciones articulares | Posición y orientación deseadas del efector final |
| Salida | Posición y orientación del efector final | Posiciones articulares |
| Complejidad | Relativamente sencillo | Puede ser complejo, con múltiples soluciones |
| Solución | Solución única y directa | Solución no siempre única, puede requerir métodos numéricos iterativos |
El método cinemático directo es una herramienta fundamental en robótica que permite comprender y controlar el movimiento de los robots. Su comprensión, junto con el modelo cinemático inverso y el modelo dinámico, es esencial para el diseño, la simulación y el control de robots en diversas aplicaciones industriales.