hace 2 años
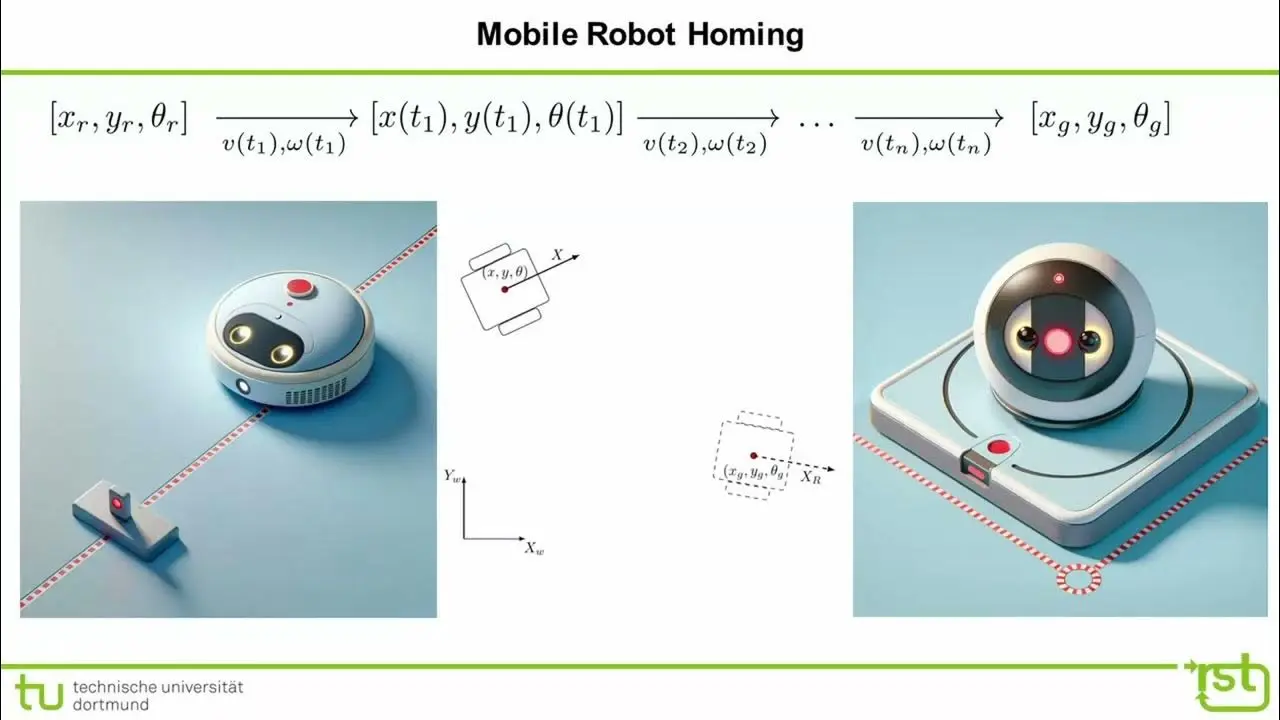
El homing en robótica es un proceso fundamental que permite a un robot regresar a una posición de referencia conocida, llamada posición 'home' o 'inicial', después de haber realizado movimientos o desplazamientos a lo largo de una trayectoria. Esta capacidad es crucial para diversas aplicaciones, desde la automatización industrial hasta la robótica móvil.

Importancia del Homing en Robótica
La capacidad de homing es esencial por varias razones:
- Precisión y Repetibilidad: Permite al robot volver a un punto exacto, garantizando la precisión y la repetibilidad de las tareas. Esto es vital en aplicaciones donde la precisión es crítica, como la soldadura, el ensamblaje o la manipulación de objetos delicados.
- Calibración y Referencia: La posición 'home' sirve como punto de referencia para todos los demás movimientos del robot. Al regresar a esta posición, el robot puede recalibrarse y corregir cualquier error acumulado durante su operación.
- Seguridad y Fiabilidad: En situaciones donde el robot se desplaza en un entorno impredecible, el homing ofrece una manera segura de retornar a un estado conocido, minimizando el riesgo de colisiones o daños.
- Reinicio y Recuperación: Si el robot se desconecta o experimenta un fallo, el homing permite que se reinicie de forma segura y eficiente, volviendo a su posición inicial para continuar con sus operaciones.
Métodos de Implementación del Homing
Existen varios métodos para implementar el homing en robótica, cada uno con sus ventajas y desventajas:
Utilización de Sensores de Posición:
Los sensores de posición, como los codificadores incrementales o absolutos, proporcionan información precisa sobre la posición del robot. Al regresar a la posición 'home', se establece un valor de referencia que el robot utiliza para futuras localizaciones.
Sensores de Referencia:
Algunos robots utilizan sensores de referencia, como interruptores de límite o sensores ópticos, que detectan cuando el robot alcanza la posición 'home'. Estos sensores son simples y robustos, pero su precisión puede ser limitada.

Visión Artificial:
La visión artificial puede utilizarse para identificar características visuales en el entorno que permitan al robot determinar su posición y retornar a la posición 'home'. Este método es más complejo pero ofrece una mayor flexibilidad y capacidad de adaptación.
Odometría:
La odometría consiste en calcular la posición del robot a partir de la información de sus ruedas o motores. Aunque es un método simple, la odometría es susceptible a la acumulación de errores, lo que la hace poco fiable para un homing preciso a largo plazo. Es por esto que se prefiere la combinación con otros métodos, para la corrección de errores.

Tabla Comparativa de Métodos de Homing
| Método | Precisión | Costo | Complejidad | Fiabilidad |
|---|---|---|---|---|
| Sensores de Posición | Alta | Medio-Alto | Medio | Alta |
| Sensores de Referencia | Baja-Media | Bajo | Baja | Media |
| Visión Artificial | Alta | Alto | Alta | Media-Alta |
| Odometría | Baja | Bajo | Baja | Baja |
Consideraciones para la Implementación del Homing
Al implementar el homing en un sistema robótico, se deben considerar varios factores:
- Precisión requerida: La precisión del homing debe ajustarse a las necesidades de la aplicación.
- Costo: El costo de los sensores y la complejidad del sistema de homing deben ser evaluados.
- Fiabilidad: El sistema de homing debe ser fiable y robusto para garantizar la operación continua del robot.
- Mantenimiento: Se debe considerar el mantenimiento de los sensores y del sistema de homing .
Consultas Habituales sobre Homing en Robótica
Aquí hay algunas consultas habituales sobre el homing en robótica:
- ¿Qué sucede si el robot falla durante el proceso de homing? El comportamiento dependerá del diseño del sistema. Algunos sistemas pueden intentar el homing de nuevo, mientras que otros pueden detenerse y requerir intervención humana.
- ¿Cuál es la diferencia entre homing y calibración? El homing es el proceso de regresar a una posición de referencia, mientras que la calibración es el proceso de ajustar los parámetros del robot para mejorar su precisión y exactitud.
- ¿Se puede implementar el homing en robots móviles? Sí, el homing es crucial en robots móviles, ya que les permite regresar a una base o punto de carga.
- ¿Qué tipo de sensores son los más adecuados para el homing? La elección del sensor dependerá de la aplicación específica y de los requisitos de precisión y costo.
Ejemplos de Aplicaciones del Homing
El homing se utiliza en una amplia gama de aplicaciones robóticas, incluyendo:
- Automatización industrial: En líneas de producción, el homing permite a los robots regresar a una posición inicial para realizar tareas repetitivas con precisión.
- Robótica móvil: Los robots móviles utilizan el homing para regresar a una estación de carga o a un punto de partida conocido.
- Robótica quirúrgica: En cirugía robótica, el homing es esencial para garantizar la precisión y la seguridad del procedimiento.
- Inspección y mantenimiento: Robots utilizados para la inspección y mantenimiento de infraestructuras pueden utilizar el homing para regresar a una posición segura después de completar una tarea.
El homing es una funcionalidad esencial en la robótica moderna, permitiendo la precisión, repetibilidad y seguridad en una variedad de aplicaciones. La comprensión de los diferentes métodos de implementación y las consideraciones de diseño es crucial para el desarrollo de sistemas robóticos eficientes y fiables.